Status, Steuerung und Automatisierung Robomow (Rasenmähroboter)
-
Hallo Apollon,
ich nutze einen Robomow RC 306 Mäher. Ich versuche in den nächsten Tagem mal dein Script. Ich würde gerne die Programmierung des Mähers auch in Vis einbauen, allerdings habe ich noch keine Idee dazu. Ich melde mich bezüglich deines Scripts bestimmt die Tage nochmal wenn ich es im Einsatz habe.
Danke schonmal dafür.
Gruß Sven
-
Dann bin ich gespannt ob die Werte grob auch passen.
Ich würde gerne die Programmierung des Mähers auch in Vis einbauen, allerdings habe ich noch keine Idee dazu. `
Da gibt es nur eine Option aktuell (weil noch keiner das Bluetooth-Protokoll rausgefunden hat): http://www.roboter-forum.com/showthread … -Homematic
Kurz: man verbaue HM-Schaltaktoren und zapft das Kabel an wo die Tastendrücke an das Mainboard gemeldet werden und so kann man die Tasten fernbedienen ... Steht bei mir noch auf der Umbauliste
")
-
Ich bin auch am überlegen meinen RC306 zu integrieren.
Morgen kommt da erst mal ein neues Update drauf, dann muss ich mal schauen ob ich den
- HM-LC-Sw4-Ba-PCB mit einer 9V Batterie
oder
- ein Wemos mit ESPEasy wie hier beschrieben. https://www.loxforum.com/forum/faqs-tut … -einbinden
Würde den dann per MQTT einbinden.
Hat einer sowas bereits umgesetzt und kann ein wenig Erfahrungen hier posten?
Gruß
-
Ich habe es jetzt mit nem HM-8-fach Modul, 5 Relais und nem 26V->5V Spannungswandler gelöst und komme so um die Batterie rum …
-
Ich habe es jetzt mit nem HM-8-fach Modul, 5 Relais und nem 26V->5V Spannungswandler gelöst und komme so um die Batterie rum … `
Hi, ist auch ein Thema bei mir.
-
Welche Relais benutzt du?
-
Sollte man nicht lieber 5 Mofets nehmen? http://www.roboter-forum.com/showthread … post200132
-
Ich bin mir nicht sicher für welche Lösung ich mich entscheiden soll: Vor- und Nachteile von Homematic vs. Wifi
-
Schick mal ein Foto wie du das Ding im Robomow untergebracht hast.
LG,
a200.
-
-
Hi,
bin ehrlich: Ich lasse mir das gerade bauen von dem der https://www.der-technikmarkt.de/ macht. Ich kann zwar lösen, aber so alles zusammen macht so für mich mehr sinn als "Rundum-sorglospaket". Aber ja Mofets gehen auch. Ich will irgendwas haben als galvanische Trennung - ich finde es gefährlich wie einige die Open-CVollector-Ausgänge der HM-Module direkt auf die Robomow-kabel legen …
Da ich recht viel HM im Einsatz habe ist das für mich eher naheliegend.
Klar Wifi und Arduino und so geht auch, aber aus meiner Erfahrung kostet das gerade mehr Zeit bis es stabil läuft als ich erübrigen kann (die Zeit stecke ich lieber in die eigene Fingerabdruck-Lösung mit Steuerung
) Es ist immer so eine Thematik ... Standard oder selbstgebastelt. Bei selbstgebastelt versuche ich immer irgend wie dann doch eine gleiche Basis zu haben, sonst verzettel ich mich und wenn mal was ist brauche ich viel länger das zu fixen weil alles anders tickt.Verbauen werde ich es wie im Thread bei früheren Lösungen gezeigt in dem kleinen "Kofferraum" unter der Hauptabdeckung.. Also am Motherboard mit einem selbstgebastelten Y-Kabel die 8 Kabel abgreifen und mit einem Kabel dann da hin führen. Da hast Du ca. 130x80 und 50 hoch Platz für ein kleines Gehäuse.
Wenn es mal läuft versuche ich mal ein Script zu bauen mit dem man das dann steuern kann. Am Ende sind die "Datenpunkte" für die einzelnen tasten ja Umsetzungsunabhängig, wenn man davon ausgeht das das setzen eines solchen immer einen 1s-"Impuls" auslöst sollte dann ein Steuerskript generisch funktionieren.
Ingo
-
HM wäre wir auch lieber, ich habe zwar ne paar Wemos hier am werkeln, für den Robomow wäre mir das zu unsicher.
Was hast du da genau bestellt bei denen? Wenn das ein rundum sorglospaket (DC Wandler, Y- Stecker, HM ist denke ich mal mit einer Relaisplatine) ist, dann würde ich das auch gerne ordern. Wenn dann alles noch in einer Box wäre, ist das perfekt.
Falls die nicht komplett alles zusammenbauen, Wäre Teile müsste ich da genau haben? Allein der Stecker ist für nicht schon ein Rätsel.
Gruß und Danke
-
Das Sorglospaket würde mich auch interessieren, dann wären wir schon 3.
Was würds denn kosten?
-
Ich bin gerade in Kontakt mit denen. Morgen sollte der Prototyp fertig sein.
Melde mich dann noch mal.
-
Jupp,
wenn alles glatt geht geht meine Version (=Prototyp) am Mittwoche zu mir raus und dann muss ich "nur" noch Zeit finden das Y-Kabel zu lösen und es final einzubauen …
Mit Gehäuse und Versand 99,99 EUR ... ist zumindestens mal das was ich bezahlt hab. Ist ne Hausnummer, aber mir die Teile und Zeit wert.
-
@ple:Ich bin gerade in Kontakt mit denen. Morgen sollte der Prototyp fertig sein.
Melde mich dann noch mal. `
Ich wäre auch interessiert. Allerdings bin ich mir nicht sicher ob die Relais vom vielen Ruckeln nicht kaputt gehen.Ansonsten hier meine Zusammenstellung:
5 x Leistungs-MOSFET N-Ch TO-220AB 100V 9,7 A https://www.reichelt.de/Wandler-groesse … KI515W36HC
2 x Platinensteckverbinder gerade, weiss, 8-polig https://www.reichelt.de/Platinen-Steckv … 25%2F8G+WS
1 x Streifenrasterplatine, Hartpapier, 100x100mm https://www.reichelt.de/Streifenraster/ … r=H25SR100
1 x DC/DC Konverter OKI 78SR-Serie 8W, 5V DC, SIP, Single https://www.reichelt.de/Wandler-groesse … KI515W36HC
1 x HM-MOD-Re-8 8-Kanal-Empfangsmodul https://www.elv.de/homematic-8-kanal-empfangsmodul.html
Damit wäre ich bei 30,64 € + Versand
Ob der Spannungswandler so i.O. ist, bin ich mir auch nicht sicher. Kann das sich das einer von den Spezialisten anschauen?
LG,
a200
-
Wenn wir bereits zu dritt sind, sollten wir uns überlegen, ob wir die Entwicklungskosten teilen.
Somit wäre der Gesamtpreis geringer für jeden.
Wenn ich dann noch was drauflege ist mir gesparte Zeit das wert.
-
Damit wäre ich bei 30,64 € + Versand `
Nimm lieber 6 Mosfets, dann hast Du alle Tasten unterstützt. Ich hab es mir als Anschlussklemmen machen lassen weil ich bei dem vom Mainboard kommenden kabel nicht nicht nochmal was anlösen wollte. Da macht der Steckverbinder mit 20cm Kabel daher wenig sinn in meinen Augen.
Also dann 40-45 EUR für die Teile. Dazu kommt noch etwas was als Gehäuse herhält. Ich bin bei sowas dann bereit 50 EUR durchaus für den "fachmännischen" Zusammenbau zu bezahlen
-
Damit wäre ich bei 30,64 € + Versand `
Nimm lieber 6 Mosfets, dann hast Du alle Tasten unterstützt. Ich hab es mir als Anschlussklemmen machen lassen weil ich bei dem vom Mainboard kommenden kabel nicht nicht nochmal was anlösen wollte. Da macht der Steckverbinder mit 20cm Kabel daher wenig sinn in meinen Augen.
Also dann 40-45 EUR für die Teile. Dazu kommt noch etwas was als Gehäuse herhält. Ich bin bei sowas dann bereit 50 EUR durchaus für den "fachmännischen" Zusammenbau zu bezahlen
`Tja, es sind 8 Leitungen:
X Braun = Masse
1 Rot = Stop
? Orange = ???
2 Gelb = Mähen mit Kante
3 Grün = Mähen ohne Kante
4 Blau = Home
5 Lila = Ok
X Grau = 26V+
Aber was macht die sechste Teste (Orange)?
-
Ich tippe auf "Settings" weil das die Taste ist die Fehlt, oder ?!
Müsste man mal testen
-
Ansonsten hier mal die Idee eines kleinen Steuerskripts für ioBroker :-))
`var RobomowButtons = { // Definition der Buttons 'STOP': true, 'HOME': true, 'RIGTH': true, 'LEFT': true, 'SETTINGS': true, 'OK': true }; var RobomowButtonController = { // Definition der ioBroker-States zum Triggern der einzelnen Tasten 'STOP': 'hm-rpc.0.....', 'HOME': 'hm-rpc.0.....', 'RIGTH': 'hm-rpc.0.....', 'LEFT': 'hm-rpc.0.....', 'SETTINGS': 'hm-rpc.0.....', 'OK': 'hm-rpc.0.....' }; var RobomowButtonControllerTriggerTime = 1000; // Länge eines Tastendrucks = 1 Sekunde var RobomowZones = { // Zonen mit Anzahl der nötigen Tastendrücke zur Auswahl 'L1': 0, // Hauptzone 'L2': 1, 'L3': 2, 'A1': 3, // Nebenzonen 'A2': 4, 'A3': 5, 'A4': 6 }; var RobomowButtonFlows = { 'STOP': [ {command:'STOP', wait: 3000} ], 'HOME_UNLOCKED': [ {command:'STOP', wait: 3000}, {command:'HOME', wait: 1000} ], 'HOME_CHILDLOCK': [ {command:'STOP', wait: 3000}, {command:'HOME', wait: 1000}, {command:'OK', wait: 1000} ], 'MOW_NORMAL': [ {command:'LEFT', wait: 1000}, {command:'ZONE_SELECT', wait: 1000}, {command:'OK', wait: 1000} ], 'MOW_WITH_EDGE': [ {command:'RIGHT', wait: 1000}, {command:'ZONE_SELECT', wait: 1000}, {command:'OK', wait: 1000} ] }; var lastRobomowCommand = null; var lastRobomowZone = null; function processRobomowCommand(commandname, zone, callback) { if (typeof zone === 'function') { callback = zone; zone = undefined; } var buttonFlow = []; if (commandname !== 'STOP') { // 2x STOP to Wake up ?! buttonFlow.push({command:'STOP', wait: 1000}); buttonFlow.push({command:'STOP', wait: 1000}); } for (var i = 0;i < RobomowButtonFlows[commandname].length; i++) { var currentCommand = RobomowButtonFlows[commandname][i]; if (RobomowButtons[currentCommand.command] === true) { buttonFlow.push(currentCommand); } else if (currentCommand.command === 'ZONE_SELECT') { if (zone && RobomowZones[zone] !== undefined) { for (var j=0; j < RobomowZones[zone]; j++) { buttonFlow.push({command:'RIGHT', wait: 1000}); } } else { //ERROR } } else { //ERROR } } function processCommands(callback) { if (buttonFlow.length > 0) { var current = buttonFlow.shift(); //setState(RobomowButtonController[current.command], true, false); console.log('Press ' + current.command + ', wait=' + current.wait); setTimeout(processCommands, (RobomowButtonControllerTriggerTime + current.wait), callback); } else { lastRobomowCommand = commandname; if (zone) lastRobomowZone = zone; if (callback) callback(); } } processCommands(callback); } processRobomowCommand('MOW_NORMAL', 'A1');` Das was man am Ende aufruft ist die Funktion "processRobomowCommand" mit einem Parameter für das Kommando, pot ein zweiter Parameter für die Zone. Dann werden Kommandos gesendet - bedeutet die oben angegebenen States in den definierte Abständen auf true gesetzt. Trocken läuft es .. rest sehen wir mal noch :-)[/i] -
Nicht schlecht, besten Dank.
Ich habe gerade bei mir in der Rummelkiste noch ein 8 fach Relaisboard gefunden.
https://www.amazon.de/8-Kanal-Optokoppl … lais+board
Ich werde das erst mal einsetzen mit einem DC Wandler L7805CV. Mal schauen ob das gut läuft und auch unterzubringen ist.
Dürfte normal auch gehen.
gibt es sonst noch Infos zu der anderen bestellten Platine?
Gruß
-
Vielleicht ist das hier was?
https://www.ebay-kleinanzeigen.de/s-anz … -168-20910
https://www.ebay-kleinanzeigen.de/s-anz … -168-20910
Hab mir so eine Teil gekauft. Jetzt nur noch ein Spannungswandler und die Stecker!
Melde mich nach dem Urlaub.
a2200.
-
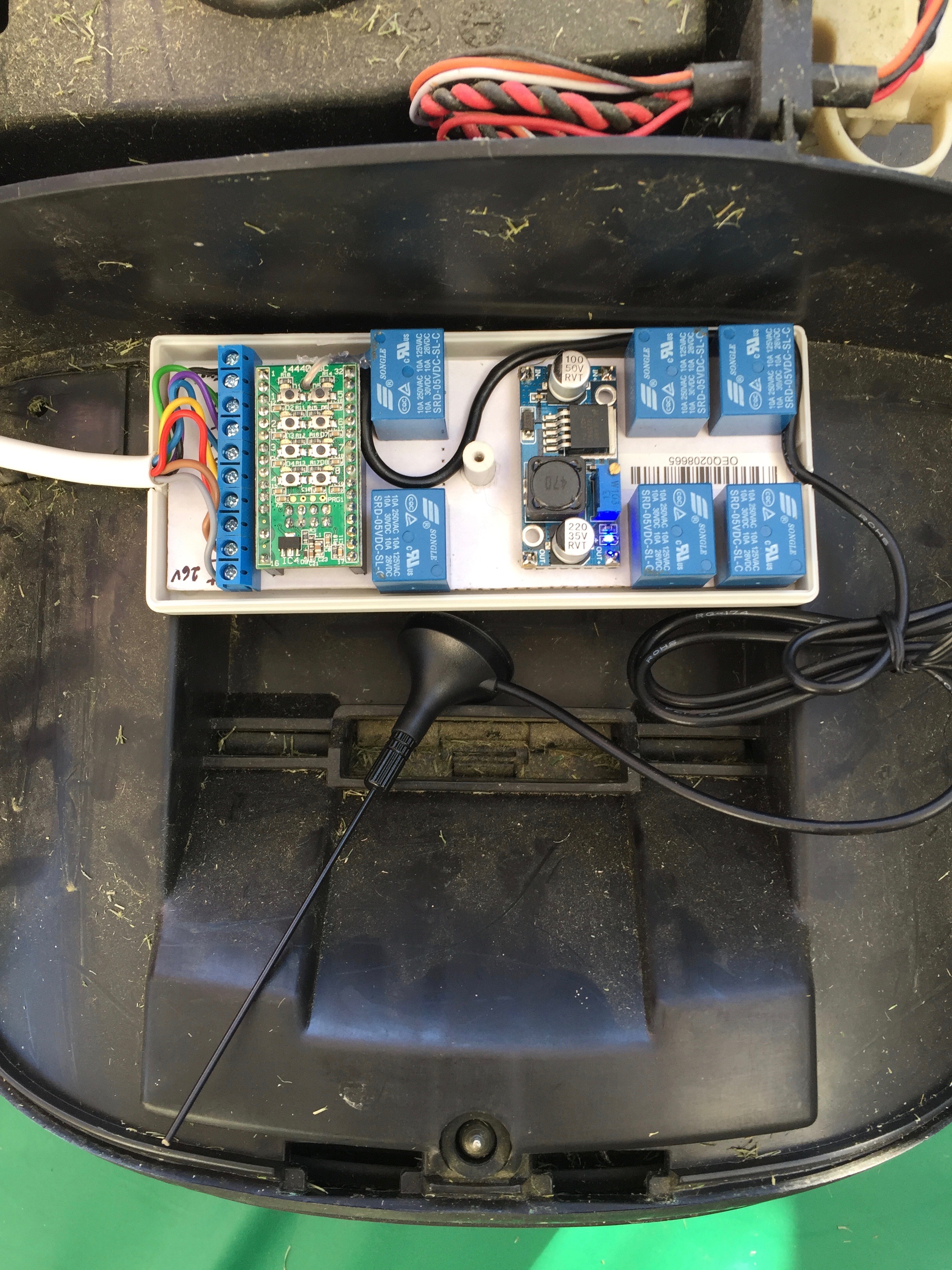
So, was lange währt wird endlich gut … habe jetzt am Wochenende auch endlich die Zeit gefunden das umzubauen. Ich steuere alles per ioBroker und habe dort mit zwei Skripten quasi grob den Ablauf der Programme nachgebaut wie es Robomow auch macht (ausser das man Zeiten pro Zone angibt und das nicht aus der Fläche und so errechnet wird. Also bissl einfacher).
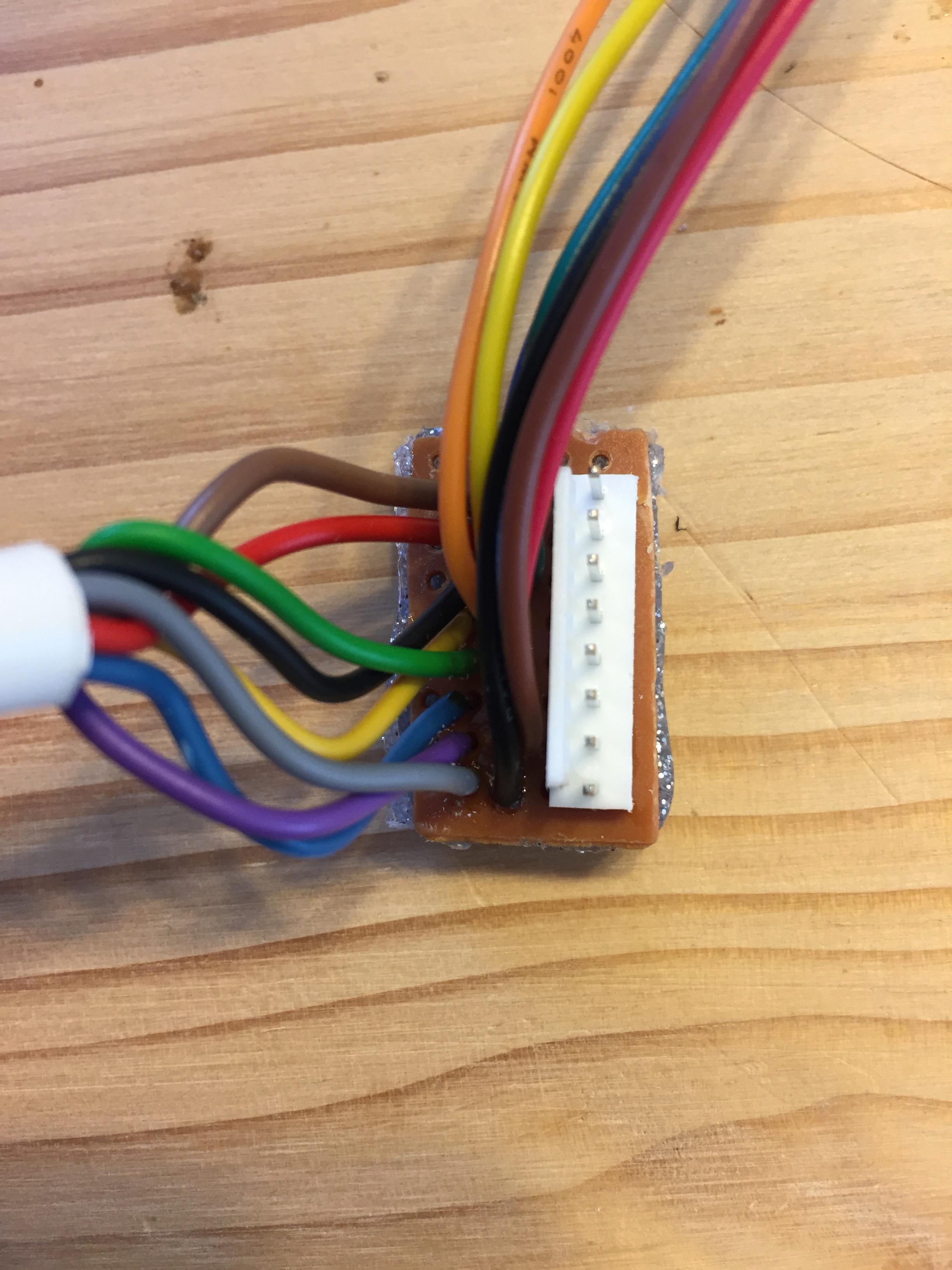
Da ich nicht der Elektronik-Fan bin habe ich mir den Schalt-teil von http://www.der-technikmarkt.de quasi customized bauen lassen inklusive Antenne. kann ich empfehlen wenn man nicht so ein Löt- und Elektronikfan ist. Nur den "Y-Verbinder" der das relevante Kabel "anzapft" habe ich selbst gelötet auf einer kleinen Leiterplatte (Kontakte mit Heißkleber "isoliert"). Die passt locker mit bei der Bedieneinheit rein. Der Rest sitzt bei meinem RC304 im "Kofferraum" vorn unter der Haube und ist dort mit Heißkleber festgeklebt. Das Kabel bekommt man bei Bedraf auch bei http://www.der-technikmarkt.de .
Bin gespannt ob die "normalen" Relais das Gewackel aushalten ... sonst muss man da überlegen ...

Jetzt ist er heute zum ersten mal mit meiner Steuerung gelaufen. Musste gestern nur etwas experimentieren. Übrigens: Eine Schaltzeit von ca.300-400ms für einen tastendruck hat sich bei mir aus gut herausgestellt.
Ich aktualisiere später noch oben die Skripte und Stelle alle 3 Skripten ein:
-
Statuserkennung über Strommessung- und Anwesenheitskontakt
-
Generische Steuerung per "Fernbedienung" der Tasten
-
Automatik-Ablaufsteuerung
Also stay tuned
Ingo
-
-
Ich habe auch bereits alles zu Hause liegen, nur noch keine Zeit gehabt zu löten

Vielleicht komme ich am Wochenende dazu.
Hast du noch Bilder von der Rückseite der Platine?? Würde mich ja interessieren.
Auf dein Script bin ich nachher gespannt
Vielen Dank dafür.Gruß
