Test Adapter pid (pid-Regler) V1.0.x
-
@mcm57 Also wenn ich hold auf true setze, dann rst auf true,
dann bekomme ich
nach 10s rst = true den doppelten Wert wie nach 5s rst = true.
Daraus schließe ich, dass dort nicht y=(act-set)*kp + off gerechnet wird, sondern noch das Tn mit rein spielt.das Weiteren:
Wenn ich die hysterese (supr) auf 5 (oder sonst einen Wert setze). Worauf bezieht diese sich denn? Ich dachte auf die regelabweichung, dies ist anscheinend nicht der Fall. oder?
Sonst wäre ja hier diff nicht 0.
ich würde es wie schon mal geschrieben nicht auf eine Änderung beziehen, sondern wirklich auf die Regelabweichung, denn:Wenn die Differenz dauerhaft sagen wir +1/2*Hysterese ist, dann kann der Stellwert und damit der Regler langsam weglaufen.
Wenn die Hysterrese sich auf die Regelabweichung bezieht, kann dies nicht passieren, da spätestens nach dem 2. zyklus die volle hysterrese erreicht wurde und die regelung wieder greift- -
@mcm57 wenn ich Tn bei laufendem Regler verändere, z.B. von 10s auf 2s macht y einen riesen Sprung, z.B. von 4 auf 20, also ca. um den Faktor, um den ich Tn reduziert habe. Umgedreht genauso: von 2s auf 10s kommt ein Sprung von 30 auf 6. Ist das richtig? Ich hätte eher erwartet, dass y entsprechend schneller (10s -> 2s) oder langsamer (2s -> 10s) verändert wird, aber ausgehend vom aktuellen Wert (kein Sprung).
-
@ben1983 sagte in Test neuer Adapter pid (pid-Regler) V0.0.3-alpha.x:
Wenn ich die hysterese (supr) auf 5 (oder sonst einen Wert setze). Worauf bezieht diese sich denn? Ich dachte auf die regelabweichung, dies ist anscheinend nicht der Fall. oder?
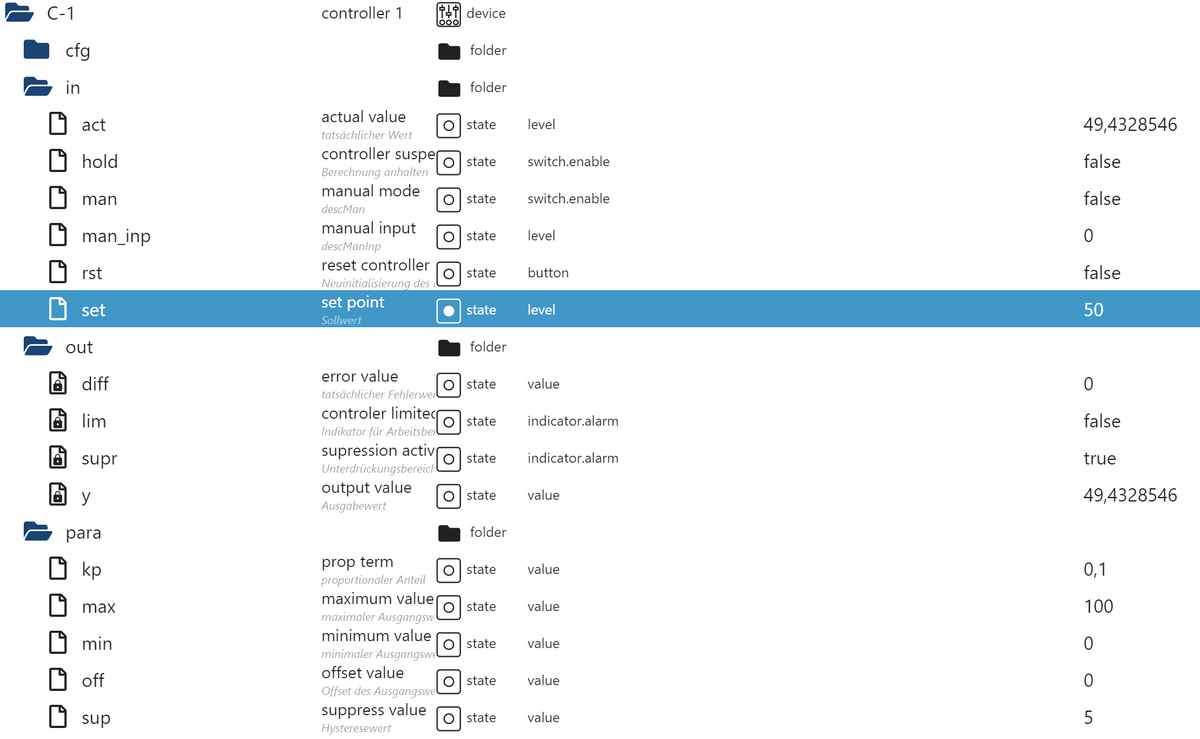
Sonst wäre ja hier diff nicht 0.Das Verhalten stimmt doch: Dein set = 50, dein act = 49,43, damit ist die Regelabweichung < 5 (dein sup), damit wird diff = 0 und supr = true
-
@ben1983 said in Test neuer Adapter pid (pid-Regler) V0.0.3-alpha.x:
@mcm57 Also wenn ich hold auf true setze, dann rst auf true,
dann bekomme ich
nach 10s rst = true den doppelten Wert wie nach 5s rst = true.
Daraus schließe ich, dass dort nicht y=(act-set)*kp + off gerechnet wird, sondern noch das Tn mit rein spielt.OK, muss ich mir ansehen
Danke f.d. genaue Beschreibugn was du tust -
@fu_zhou
Da sich der Integralwert nicht ändert ist das lt. angegebener Formel das implementierte und zu erwartende Verhalten. Es wird der Fehlerwert integriert und geht mit dem angegebenen Faktor in das Ergebnis ein.Ich kann deine Erwartung im Prinzip verstehen. Anderseits wird ein Ändern von kp auch einen Sprung auslösen und nicht "irgendwie gleitend" auf den neuen Wert gehen.
-
@fu_zhou Du hast Recht. Da war ich wohl eben etwas durcheinander und habe es selber nicht gemerkt, dass die Regelabweichung < 5 ist.
@mcm57 ich denke was mich hier verwirrt hat ist, dass Diff als 0 angezeigt wir und die Regelabweichung ja nicht 0 ist, oder was zeigst Du als Diff an? -
@fu_zhou said in Test neuer Adapter pid (pid-Regler) V0.0.3-alpha.x:
@ben1983 sagte in Test neuer Adapter pid (pid-Regler) V0.0.3-alpha.x:
Wenn ich die hysterese (supr) auf 5 (oder sonst einen Wert setze). Worauf bezieht diese sich denn? Ich dachte auf die regelabweichung, dies ist anscheinend nicht der Fall. oder?
Sonst wäre ja hier diff nicht 0.Das Verhalten stimmt doch: Dein set = 50, dein act = 49,43, damit ist die Regelabweichung < 5 (dein sup), damit wird diff = 0 und supr = true
ja
der State diff zeigt die für die Berechnung BENUTZTE Differenz an. Schlägt sup zu ist diese 0 um eben keine weitere Regelung zu bewirken. Dass sup aktiv ist wird im State supr angezeigt.Falls es stimmiger erscheint, könnte ich auch die echte differenz ausgeben. Wär wahrscheinlich sogar sinnvoller da es ja nun den State supr gibt der die Situation supression aktiv anzeigt. (Der State kam erst später dazu). Ich werde das noch ändern.
(https://github.com/iobroker-community-adapters/ioBroker.pid/issues/53) -
@mcm57 ich kann auch @fu_zhou verstehen.
Aber auch deinen Einwand mit Kp.
Generell hätte man die Berechnung auch geteilt aufbauen können in den P den I und den D Anteil.
Somit hätte man bspw. Den I Anteil zwar auch mit Kp *(delta/Tn) berechnen können, aber eben immer nur für den aktuellen Zyklus….
Eben IAnteil = IAnteil + Kp *(delta/Tn)
Somit wäre kein Sprung drin.Fällt natürlich nur bei Änderungen während des Laufens auf.
-
@ben1983 said in Test neuer Adapter pid (pid-Regler) V0.0.3-alpha.x:
@mcm57 ich kann auch @fu_zhou verstehen.
Aber auch deinen Einwand mit Kp.
Generell hätte man die Berechnung auch geteilt aufbauen können in den P den I und den D Anteil.
Somit hätte man bspw. Den I Anteil zwar auch mit Kp *(delta/Tn) berechnen können, aber eben immer nur für den aktuellen Zyklus….
Eben IAnteil = IAnteil + Kp *(delta/Tn)
Somit wäre kein Sprung drin.Fällt natürlich nur bei Änderungen während des Laufens auf.
Ja schon klar:
Man derzeit wird INTEGRAL(diff) / Tn gerechnet. Im Prinzip könnte man auch INTEGRAL (diff/Tn) rechnen. Solange Tn konstant ist muss da dasselbe rauskommen. Bei Änderungen von Tn wirkt es sich aus.Werd mal drüber nachdenken. Falls wer eine "offizielle" Doku kennt wo das Verhalten dokumentiert ist bitte um Link. Im Prinzip scheint es mir aber eher so zu sein, dass das Ändern der Regelparamater bei laufendem System eher ein "unspecified" Bereich ist.
https://github.com/iobroker-community-adapters/ioBroker.pid/issues/54
McM
-
@mcm57
@mcm57 sagte in Test neuer Adapter pid (pid-Regler) V0.0.3-alpha.x:
Ich kann deine Erwartung im Prinzip verstehen. Anderseits wird ein Ändern von kp auch einen Sprung auslösen und nicht "irgendwie gleitend" auf den neuen Wert gehen.
Bei Kp würde ich einen Sprung erwarten wg. (act-set)*Kp. Ich habe das gerade mal mit dem Regler in der S7 getestet. Da "beschleunigt" oder "bremst" der Regler die Änderung von "y" bei Veränderung von Tn ausgehend vom aktuellen Wert, ohne Sprung. Mit Sprung wird es auch schwierig, Tn durch Probieren einzustellen oder die Schritte sind so klein, dass die Sprünge vernachlässigbar sind. Ich weiß nicht wie aufwändig es wäre, das entsprechend anzupassen bzw. wie störend das aktuelle Verhalten dann in der ioBroker-Praxis ist...
-
Ich schaus mir an
https://github.com/iobroker-community-adapters/ioBroker.pid/issues/54Ich werd nur ein paar Tage warten ob massive Probleme auftreten. Insbesondere das von Ben gemeldete Verhaklten von RST und HOLD muss ich mir ansehen. Das ist nicht rational erklärbar - im Moment
-
@mcm57 Super, vielen Dank für deine Geduld und Arbeit!
-
@ben1983 said in Test neuer Adapter pid (pid-Regler) V0.0.3-alpha.x:
@mcm57 Also wenn ich hold auf true setze, dann rst auf true,
dann bekomme ich
nach 10s rst = true den doppelten Wert wie nach 5s rst = true.
Daraus schließe ich, dass dort nicht y=(act-set)*kp + off gerechnet wird, sondern noch das Tn mit rein spielt.Sorry, du hast wieder mal recht. Da ist noch ein Wurm dirnnen.
RST sollte KEINE Neuberechnung auslösen wenn der Adapter im "fixed Intervall" Mode arbeitet oder on hold ist.https://github.com/iobroker-community-adapters/ioBroker.pid/issues/55
closed [BUG] RST should NOT trigger reculculation #55
-
Ich dachte eigentlich, dass ich nur mal schnell den node-pid code in einen Adapter integriere.
So kann man sich täuschen")
Sorry für die immer noch vorhandenen Fehler. Und DANKE für euren Testaufwand. Ohne den würde der Adapter wohl noch viel länger fehlerhaft bleiben.
McM
P.S: Für heute bin ich zu müde um mal schnell was rauszuschießen. Wird wohl morgen od. ev. Freitag werden für die nächste Version
-
@mcm57 alles gut. Top Entwicklung des Adapters.
Mit dem integralanteil wäre es echt cool, wenn der immer nur den letzten Teil mit dem aktuellen Tn auf den alten Wert packt.
Das ist beim einstellen schon wesentlich besser zum Testen. -
@mcm57 hier ein Ausschnitt aus dem Quellcode vom S7-PID = der P-I-Teil, der sieht wie folgt aus:
(* read last cycle time in Microseconds *) tx := T_PLC_US(); tc := DWORD_TO_REAL(tx - t_last); t_last := tx; (* calculate proportional part *) p := KP * IN; (* run integrator *) i := (IN + in_last) * 5.0E-7 * KI * tc + i; in_last := IN; (* calculate output Y *) Y := p + i;Das sieht so aus, wie @Ben1983 oben schreibt: aufgeteilte Berechnung, und daher kein Sprung bei Verändern von Tn im laufenden Betrieb, oder?
-
Danke f.d. Beispiel. Im Prinzip hab ich es so umgesetzt.
In deinem Codebeispiel wird nur anscheinen der Mittelwert (?) der Fehlerwerte integriert - anders kann ich mir lastIn nicht erklären. Ich integriere "nur" den Fehlerwert. Glaube aber nicht, dass dies viel Unterschied im Verhalten macht, zumindest sicher nicht wenn der Fehlerwert nicht groß herumspringt. -
Release 0.0.3-alpha.1 ist da
- geändert: Einstellung rst Zustand löst keine Neuberechnung mehr aus
- geändert: State diff zeigt nun den Fehlerwert, auch wenn sup aktiv ist
- geändert: Die Berechnung des I-Teils wurde geändert; Änderungen a, Paramater Tn wirken nur mehr auf zuküftige Anteile",
Offen ist noch die Anpassung der Formel im GUI
Schaut bitte mal ob das jetzt besser passt.
-
@mcm57 Der ganze PID-Algorithmus in der S7 ist eine Kombination aus Funktions-Aufrufen. Ist es hilfreich, wenn ich das alles mal zusammensuche? Ich glaube eher nicht, dazu sind wir hier schon weit genug, würde ich sagen.
-
@mcm57 cool, schaffe ich aber erst heute Abend, auch wenn mich das aktuell mehr juckt, als die Arbeit
")

